垛(duǒ).png")

功(gōng)能特点
(1)AI核(hé)心
基于(yú)树莓(méi)派强(qiáng)大(dà)的Al计算能力,系(xì)统内核是(shì)一个小巧却功能强大(dà)的计算机,它可以让你并(bìng)行(háng)运行多个神经网(wǎng)络(luò)、对象(xiàng)检测、分割和(hé)语音处(chù)理(lǐ)等应用程(chéng)序, 系统搭载高性能Cortex-A72 64位四(sì)核(hé)处理器,2路micro-HDMI端口(kǒu)支(zhī)持(chí)分辨率(lǜ)高达4K的双显示(shì)屏,高达(dá)4Kp60的硬件视频(pín)解码(mǎ),高达(dá)8 GB的RAM,双频(pín)2.4/5.0 GHz无线(xiàn)局域网,蓝牙5.0,千兆以(yǐ)太网,USB 3.0和PoE功能,带来足够的Al计算能力(lì),并支持(chí)一系列流行的Al框架和算法,比如TensorFlow、Pytorch、caffe/caffe2、Keras、MXNET等。
(2)系统框架与AI框架
系统预(yù)装Raspbian操作系统,所有环境(jìng)代码库文件均(jun1)已安装,开(kāi)机(jī)即用。Raspbian在云计算领域效率(lǜ)极高,特别适用(yòng)于机器学习这样的存储(chǔ)密集型(xíng)和计(jì)算密集型任务。提供详细的python开源(yuán)范例程序,。
Python具有(yǒu) 简单、易学、免费、开源、可移植、可扩展、可嵌入(rù)、面向对象等优点,它的面向对(duì)象甚至比Java和C#更彻底(dǐ);多种AI框架:OpenCV计算(suàn)机视觉库,TensorFlow AI框架(jià),Pytorch AI框架等。
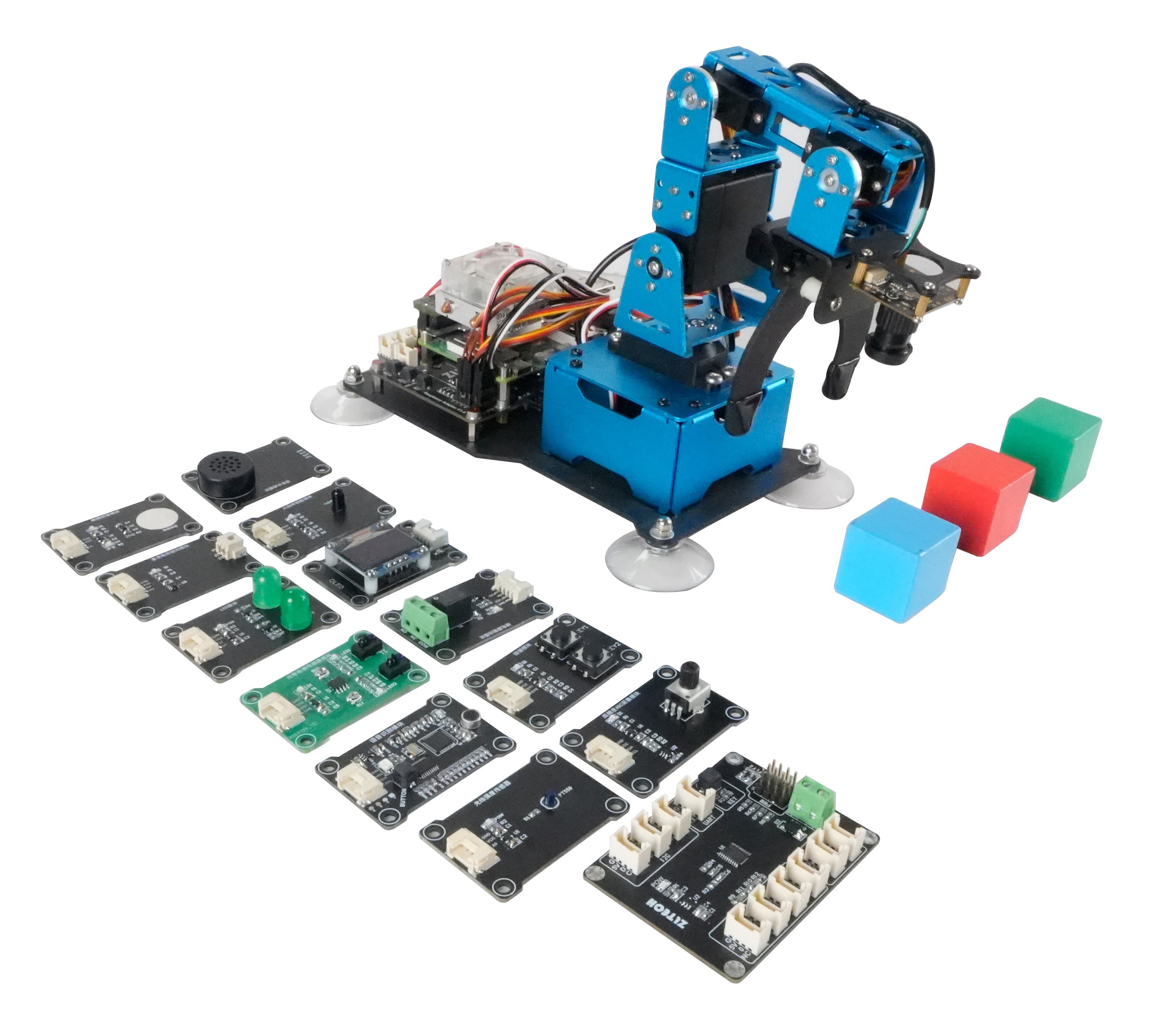
(3)基础GPIO与传感器实验基础实验模块
人工智能技术应用与开发平台基础GPIO与传感器实验(yàn)模块,包括:LED实验、继电器实验、轻触开关按(àn)键实验、光敏传感器实验、火(huǒ)焰报警实验、触(chù)摸开关实验、直流电机(jī)风扇模块(kuài)实验(yàn)、高精(jīng)度ADC采集(jí)实验等全系列传感器。
(4)AI视觉(jiào)实验模块
OpenCV( Open Source Capture Vision) 是(shì)一个免费的(de)计算机视觉库, 可通过(guò)处(chù)理(lǐ)图像和视频(pín)来完成各种任务,比如(rú)显(xiǎn)示(shì)摄像头输入的信号以及让机器(qì)人识别现实生活中的物体。AI 视觉模块以(yǐ)OpenCV为图像处理库,搭载高清120°广角摄像(xiàng)头,拥有第一(yī)视觉(jiào),可实现颜色识别(bié)、形状识别、基于Pytorch的手势识别、AI人工智(zhì)能脸部(bù)特征识别等功能。
(5)AI语音交互(hù)实(shí)验模块
AI语音交互实验模块(kuài)涉及语音(yīn)识别和(hé)语音合(hé)成模块。语音识(shí)别该模块使(shǐ)用方便,学生无需深入了解语音识别原理,通(tōng)过IIC通信(xìn),即可(kě)识别语音,输出结果,可直接用于多种人机交互场景的开(kāi)发实(shí)验中。语音合(hé)成模块是一款可实现中文、英文合成,并集成语音编码、解码功(gōng)能,可(kě)实现(xiàn)音量(liàng)调节、智能语速、语调调节等功能,模(mó)拟真人(rén)发音效果,可助力开发者实现(xiàn)顺畅自然的(de)智能(néng)语(yǔ)音交互体验。结合音(yīn)识别模块和语音合成模块,实(shí)现智能语(yǔ)音交互实验、语音唤醒实验、语音控制、语音识别播(bō)报等。
(6)机(jī)器人(rén)运动(dòng)学
机器(qì)人运动学(xué)分为正向(xiàng)运动学(xué)和逆向运动学,正向运(yùn)动学即给定机械臂(bì)各关节角度,计算机器人末端位置;逆向运(yùn)动学即已知机(jī)器人末端(duān)的位置,计算机械臂对应位置的全部关(guān)节(jiē)角度。本实验以6自由度机(jī)械臂为控制对(duì)象,使用逆(nì)运动学,根据设置(zhì)的目标位置坐标,计算(suàn)出关节角(jiǎo)度; 再将关节角度换(huàn)算成(chéng)舵机(jī)脉宽,就可以(yǐ)实现机械臂(bì)末端移动(dòng)到目标位置。实(shí)现单个PWM舵机控制、机械臂多(duō)轴联等功能(néng)。
(7)ROS系统拓展模块
ROS机器人操作系统是工具、库和(hé)协议的集合,旨在简化机器人平台,构建复(fù)杂而强大的机(jī)器人,该(gāi)解决方案以流行的机器人操作系统ROS为软件(jiàn)环(huán)境(jìng),以激光雷(léi)达为载(zǎi)体,可开设ROS应用软件(jiàn)开发、激光(guāng)雷达(dá)传感器数据采(cǎi)集与融合、建图等内容相(xiàng)关(guān)的各种类型的实验(yàn)。具体涉及ROS激光雷达(dá)Gmapping,Hector,Karto,Cartographer等建图算法,实现建图、激光雷达警卫等功能。(8) 场景、多传感器器综合实(shí)验模块
通过构建场景与(3)-(7)中AI视觉(jiào)、AI语音、机器人(rén)运动学、ROS激光雷达、全系列(liè)传感模块等相(xiàng)结构,实现场(chǎng)景、多(duō)传感器器(qì)综合实验。例如(rú),a)颜(yán)色(sè)分拣:通过(guò)对目标色块(kuài)进行(háng)颜(yán)色识别和坐(zuò)标定位(wèi),可以轻松(sōng)控制机(jī)械臂实现颜色(sè)识别、抓(zhuā)取、分拣。b)智能码(mǎ)垛:通过对目标物品进行识别和(hé)定位,可以轻松实现色块码垛的(de)功能。c)目标追踪:通过(guò)对目标色块进行视觉定位(wèi),利用机械臂(bì)的(de)逆运动学算法(fǎ),可以更好的对目标色(sè)块进行(háng)捕捉和追踪。